Здесь теория. Вы также можете перейти к выбору приборов из этого раздела.
 Какие бывают столики для микроскопов
Какие бывают столики для микроскопов 
Традиционно микроскопы управлялись человеком, когда пользователь смотрел в окуляр, но все чаще микроскопия становится автоматизированной. В основе многих биомедицинских приборов лежит автоматизированный обычный или инвертированный микроскоп.
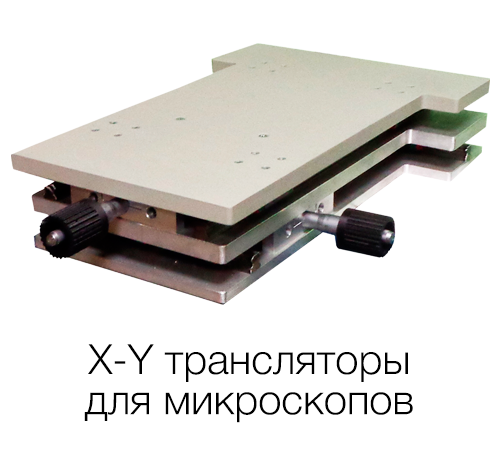
Помимо основных функций, таких как управление цифровой камерой, освещением и выбором фильтров, микроскопы нуждаются в двух важнейших функциях позиционирования. Первая заключается в точном позиционировании образца в плоскости XY. Это можно сделать либо с помощью быстрого перемещения между соседними полями (последовательная визуализация полей), либо точным движением с постоянной скоростью (сканирующая визуализация). Это движение в плоскости XY осуществляется с помощью XY-столика микроскопа, который обычно представляет собой тонкий, низкопрофильный XY-столик с центральным отверстием для оптической оси.
В старых моделях микроскопов с ручным управлением для перемещения образца используется механический столик. Новые автоматизированные XY-платформы микроскопов обычно приводятся в действие шаговыми двигателями и винтами, а в передовых конструкциях используются линейный двигатель и линейный энкодер на каждой оси, а также замкнутый контур обратной связи с сервоприводом. Второй ключевой задачей позиционирования в автоматизированном микроскопе является ось фокусировки. Она перемещает объектив относительно образца таким образом, чтобы постоянно поддерживать критический фокус.
В традиционных ручных микроскопах для фокусировки на образце используются микрометры. В осях фокусировки автоматизированных микроскопов обычно используется технология пьезо- или прямого привода. Линейные двигатели с прямым приводом обеспечивают увеличенный диапазон, позволяя втягивать объектив во время загрузки и выгрузки образца, а также очень высокое разрешение и воспроизводимость. Положением оси фокусировки обычно управляет датчик автофокусировки, который получает сигнал об ошибке фокусировки через лазерный диод, проходящий через объектив, или программный алгоритм автофокусировки.
После выбора оптических элементов формирования изображения можно завершить работу над архитектурой механического столика. Типичное поле зрения намного меньше, чем у образца, получающего изображение. Таким образом, чтобы получить изображение всего образца, либо образец, либо камера/объектив должны перемещаться вдоль двух перпендикулярных осей (XY). Кроме того, для правильного разрешения изображения необходимо точно отрегулировать расстояние между увеличивающим объективом и камерой (или датчиком изображения). Это расстояние называется осью Z. Ось Z обычно вертикальна, и движение вдоль нее, чтобы переместить образец в поле зрения, происходит перпендикулярно плоскости XY.
Существуют три распространенные конфигурации аппаратуры для перемещения механического столика. Выбор оптимальной из них зависит от сложности конкретного приложения.
1. Платформа XY микроскопа перемещает образец под осью Z, которая перемещает объектив или камеру. Это наиболее распространенная конфигурация. Преимущество этого подхода в том, что изображение после движения быстрее становится стабильным, поскольку оно движется только по одной оси. Это означает, что его можно закрепить на прочной конструкции, а не на стопке из трех подвижных осей, резонанс которых необходимо гасить. Во время загрузки образца объектив можно перемещать вертикально в сторону от зоны установки образца, что облегчает замену образцов. Кроме того, уменьшаются ошибки Аббе, поскольку общий стек короче. Этот метод подходит для обычных или инвертированных конфигураций микроскопов.

Передвигающийся по XY столик микроскопа, с отдельным объективом, перемещающимся по оси Z.
2. Три оси движения перемещают объект съемки в направлениях X, Y и Z, в то время как камера и объектив остаются неподвижными. В этой ситуации камера очень стабильна, поскольку она закреплена на жесткой поверхности. Недостатком является то, что перемещение по оси Z может быть более длительным, поскольку расстояние от объектива до датчика изображения фиксировано. Как правило, для перемещения объектива относительно датчика изображения или камеры требуется меньшее перемещение.
3. Объектив или камера перемещаются в направлениях X, Y и Z, а образец остается неподвижным. Этот подход лучше всего подходит для получения изображений небольших деталей, таких как предметное стекло микроскопа. По мере увеличения размера детали сложность этого подхода также возрастает. Для больших перемещений, как правило, требуется две оси для поддержки балки, на которой расположена вертикальная ось фокусировки с установленными на ней датчиком изображения и объективом.

 Склад
Склад Каталог
Каталог О компании
О компании Услуги
Услуги Новости
Новости Контакты
Контакты Партнеры
Партнеры
 конкурентные цены
конкурентные цены